Memory Technologies in Embedded Systems
Many types of memory devices are available for use in modern computers and embedded systems. As an embedded engineer, you must understand the differences between them and understand how to use each type effectively. Common memory types in embedded systems can be categorized into three groups: RAM, ROM, and Hybrid, as shown in Figure 1.
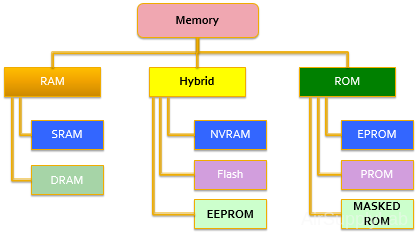
Figure 1: Common Memory Types in Embedded Systems
RAM
RAM /ræm/ (Random-Access Memory) is a volatile type of memory, where stored data is lost if power is removed. The two widely used forms of modern RAM are static RAM (SRAM) and dynamic RAM (DRAM).
Static RAM (SRAM)
SRAM is a type of semiconductor memory that uses flip-flops to store a bit of data. The problem with the use of flip-flop for storage cells is that typically each cell requires 6 transistors to build and hold one bit of data.

Figure 2: SRAM Storage Cell (6 Transistors)
Dynamic RAM (DRAM)
DRAM uses a tiny capacitor and one transistor to store one bit of data. The capacitor holds a high or low charge (logic 0 or 1), and the transistor acts as a switch that lets the control circuitry on the chip read the capacitor's state of charge or charge it. DRAM cuts down the number of transistors needed to build one storage cell. As this form of memory is less expensive to produce than static RAM, it is the primary form of computer memory used in modern computers.
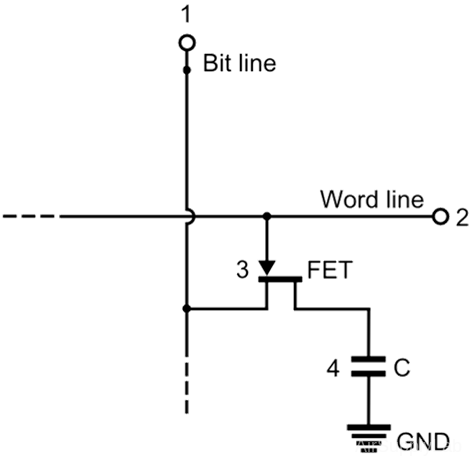
Figure 3: DRAM Cell (1 Transistor and One Capacitor)
However, the charge in the capacitor slowly leaks away and must be refreshed periodically. While the DRAM is being refreshed, the data cannot be accessed.
https://en.wikipedia.org/wiki/Random-access_memory
https://barrgroup.com/Embedded-Systems/How-To/Memory-Types-RAM-ROM-Flash
ROM
Hybrid